孔径规


RIFTEK阶梯孔内径测量系统RF096-15/40-50/70
- 品 牌:RIFTEK
- 型 号:RF096-15/40-50/70
-
技术资料:
 RIFTEK阶梯孔内径测量系统RF096-15,40-50,70
RIFTEK阶梯孔内径测量系统RF096-15,40-50,70
- 阅读次数:871
产品介绍
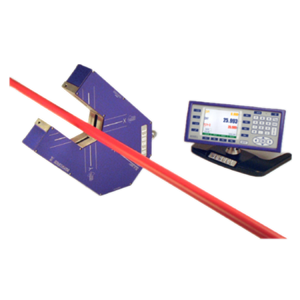
该系统的操作基于通过旋转三角测量激光传感器扫描孔表面。
该系统包含两级测量头,内部带有三个激光传感器。
第一级用于测量直径为15...40 mm的孔,包含一个激光传感器,测量范围为距头部轴6...21 mm。
第二级用于测量直径为 50...70 mm 的孔,包含两个激光传感器,测量范围偏移和重叠,24...31 mm 和距头部轴线30...37 mm。
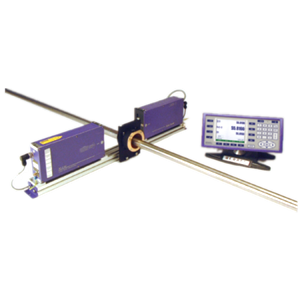
测量头安装在旋转模块上。
来自传感器的半导体激光器的辐射聚焦到物体表面。表面反射的辐射由传感器的输入透镜收集。旋转激光传感器扫描物体的内表面,系统将表面的极坐标(传感器测量到的旋转轴的距离和相应的旋转角度)传输到PC计算所需的几何参数。
性能特点
- 该系统旨在对具有两个不同直径通孔的物体进行非接触式扫描和内径测量。
- 使用系统规格中指明的电源电压和接口。
- 连接/断开电缆时,须关闭系统电源。
- 不要在靠近强光源的地方使用本系统。
- 系统必须接地。
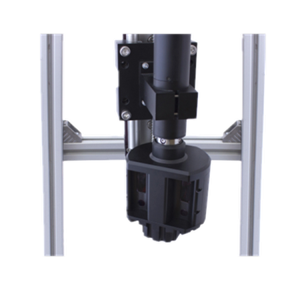
产品结构与细节

技术参数

产品尺寸




 津公网安备12010102000945号
津公网安备12010102000945号