表面测量仪器


RIFTEK激光碎片检测系统RF096-Insp
- 品 牌:RIFTEK
- 型 号:RF096-Insp
-
技术资料:
 RIFTEK激光碎片检测系统RF096-Insp
RIFTEK激光碎片检测系统RF096-Insp
- 阅读次数:878
产品介绍
该系统的操作基于双目三角激光传感器对物品表面的扫描。
该系统包含安装在旋转模块上的激光传感器(图 1. Figure 1)。
来自传感器的半导体激光辐射聚焦到物品表面。
表面反射的辐射由传感器的两个输入透镜收集。传感器旋转并扫描表面到表面的距离,由激光传感器测量和相应的旋转角度形成表面的极坐标。内置信号处理器分析表面轮廓并检测表面上是否存在碎屑。
性能特点
- 该系统用于非接触式检测不同技术项目的圆形凹槽内的碎屑,例如制动钳等。
- 该系统还可用于凹槽密封仿形(密封变形检查)。
- 系统封装由阳极氧化铝制成。
- 激光传感器的前面板有玻璃窗,用于激光束输出和接收从受控物体反射的辐射。
- 该系统还包含带磁铁的安装框架。
- 系统由连接器配备。
- 可以使用与以下所示参数不同的参数进行定制配置。
选型指南

产品结构与细节

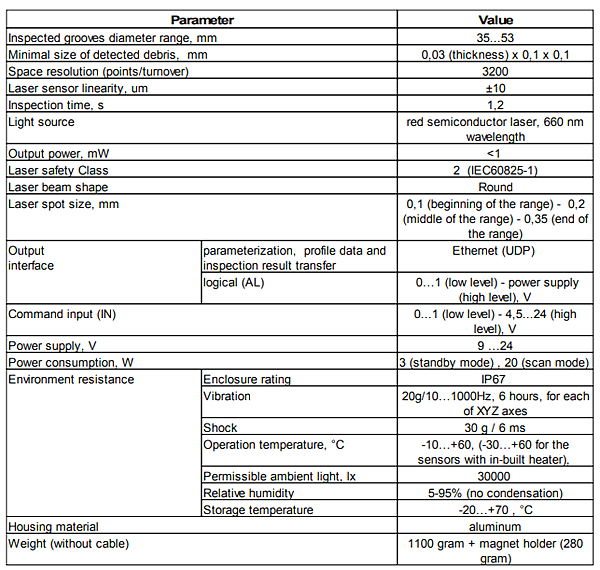
技术参数




 津公网安备12010102000945号
津公网安备12010102000945号