3D激光扫描仪/激光轮廓扫描仪/3D数字转换器


RIFTEK3D检测机RF096.2D-100/410-305
- 品 牌:RIFTEK
- 型 号:RF096.2D-100/410-305
-
技术资料:
 RIFTEK 3D检测机RF096.2D-100,410-305
RIFTEK 3D检测机RF096.2D-100,410-305
- 阅读次数:1006
产品介绍
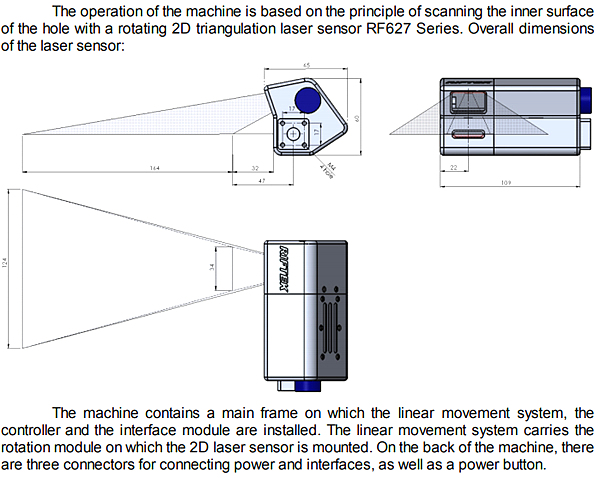
被测部件与传感器旋转系统安装在同一轴上。在外部控制器的命令下,激光传感器移动到被测孔中。传感器开始旋转并扫描零件的内表面。控制器将表面的极坐标(传感器测量到的旋转轴的距离和相应的旋转角度)传输到计算机,计算出所需的几何参数。 结果通过 PROFINET 传输到外部控制器。
性能特点
- 该机器专为轮胎行业使用的钢带轮辋的几何参数的非接触式测量而设计。
- 测量方式:激光扫描。
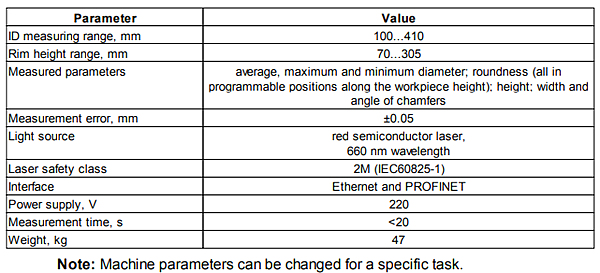
- 可以针对特定任务更改机器的技术特性。
- 该机器使用w. 660 nm 波长半导体激光器。
- 输出功率为 1 mW。
- 根据 IEC/EN 60825-1:2014,机器属于 2 激光安全等级。
选型指南

产品结构与细节
技术参数
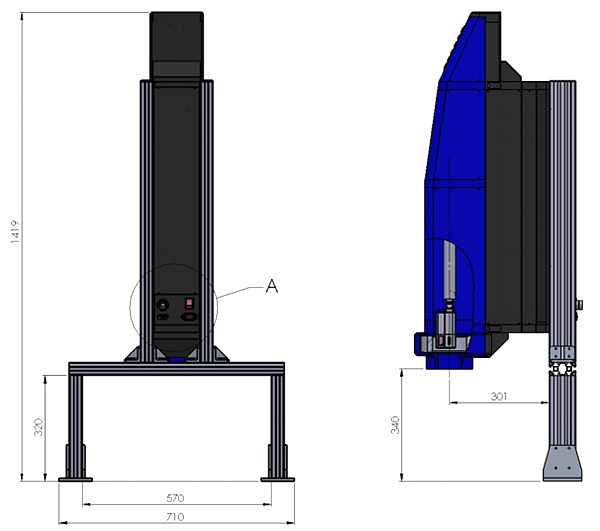
产品尺寸





 津公网安备12010102000945号
津公网安备12010102000945号